Parallel, Concurrent and Multithreading
Parallel Computing Hardware
Sequential vs Parallel computing
sequential
- program is broken down into a sequence of discrete instructions that are executed one after another
- only can execute 1 instruction at any given moment
- limitations
- the time it takes for a sequential program to run is limited by the speed of the processor
- and how fast it can execute that series of instructions
- the time it takes for a sequential program to run is limited by the speed of the processor
parallel
- breaking the tasks for them to be executed simultaneously by different processors
- accomplish a single task faster
- accomplish more tasks in a given time
- the processors has to coordinate with each other as they might be dependent on each other
- does not necessarily means speed will become twice as fast
- if a separate task B requires task A but task A is still processing even though task B is completed
- the entire process will have to wait until task A is completed
- this adds complexity
- does not necessarily means speed will become twice as fast
Parallel computing hardware
parallel computing requires parallel hardware
- with multiple processors to execute different parts of a program at the same time
different structural types of parallel computers
Flynn's Taxonomy: 1 of most widely used systems for classifying multiprocessor architectures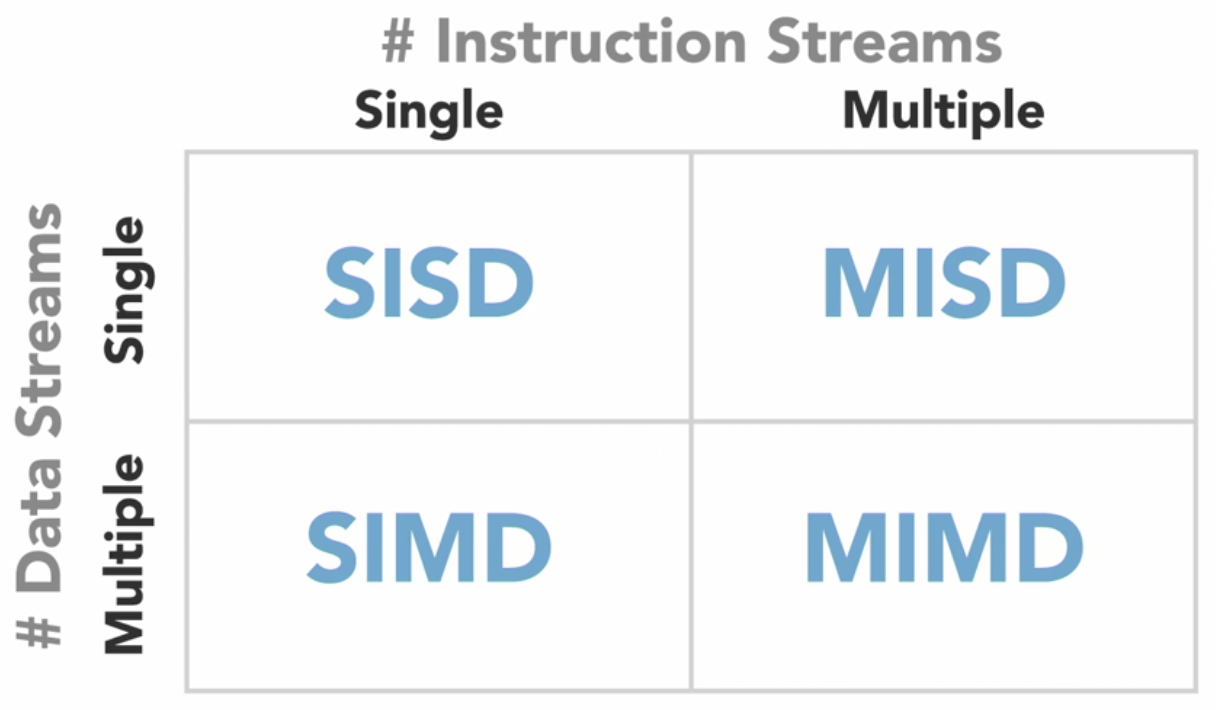
Single Instruction Single Data (SISD)
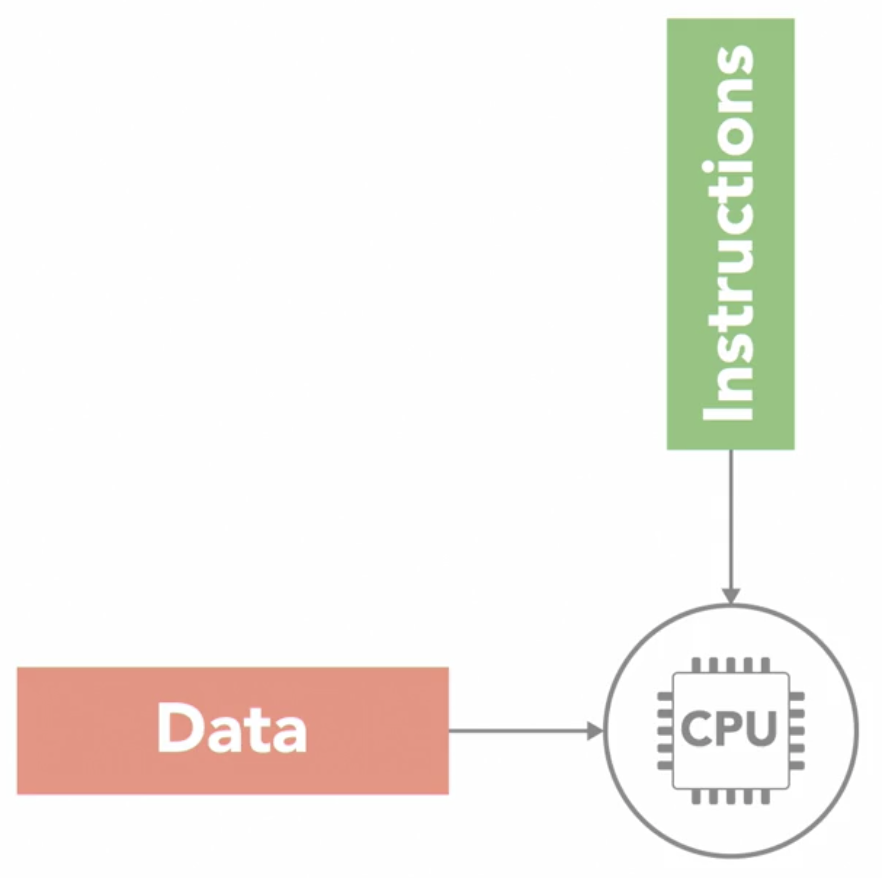
- simplest of the 4 classes
- it is the sequential computer with a single processor unit
- at any given time, can only execute 1 series of instructions and act on 1 element of data at a time
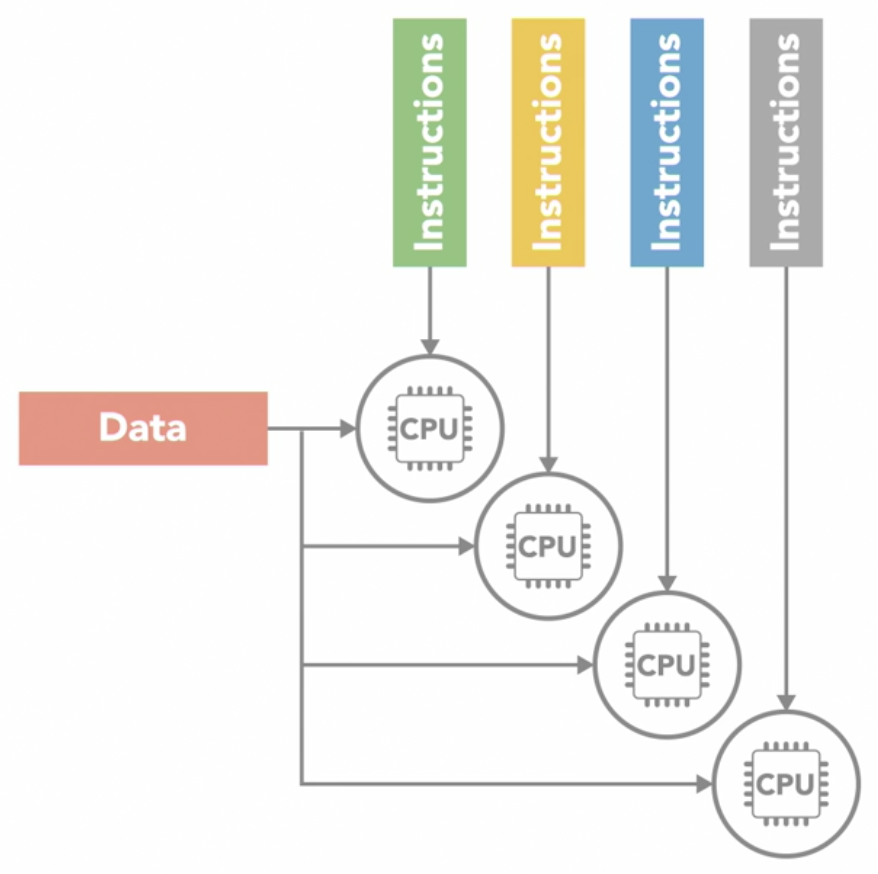
Single Instruction Multiple DATA (SIMD)
- a type of parallel computer with multiple processing units
- all of its processors execute the same instruction at any given time
- but they can operate on different data element
- this type of SIMD architecture is well suited for apps that perform the same handful of operations on a massive set of data elements
- e.g.: image processing
- most modern computers use graphic processing units (GPU) with SIMD instructions to do it
- e.g.: image processing
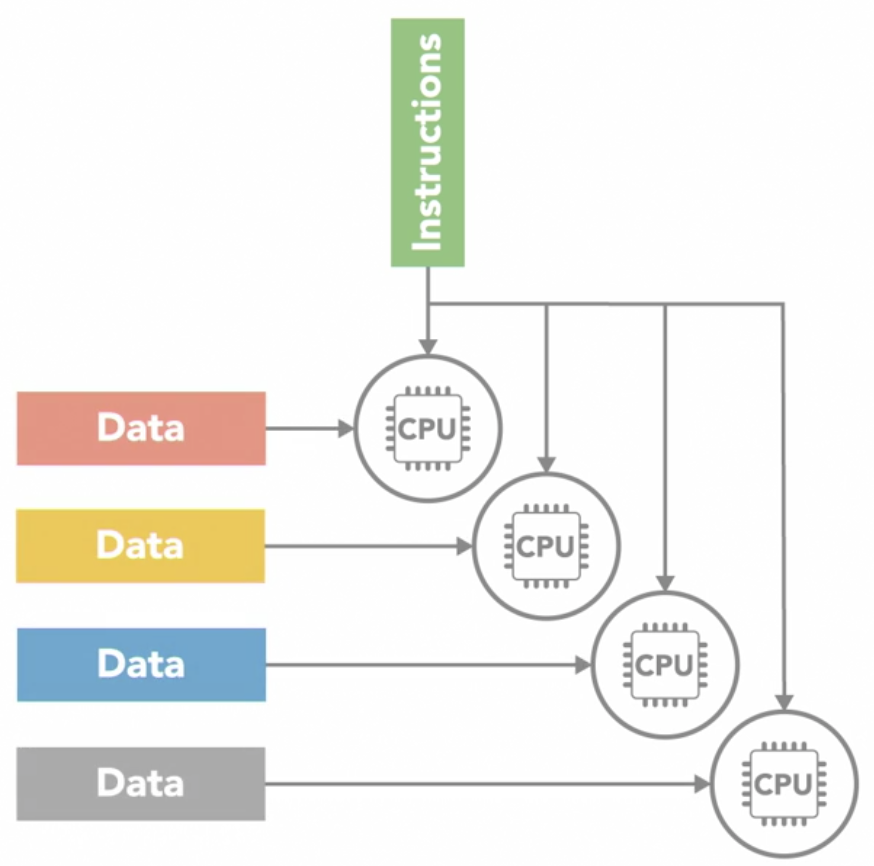
Multiple Instruction Single Data (MISD)
- the opposite of
SIMD - each processing unit independently executes its own separate series of instructions
- however, all of those processors are operating on the same single stream of data
MISDdoesn't make much practical sense, thus its not a commonly used architecture
- the opposite of
Multiple Instruction Multiple Data (MIMD)
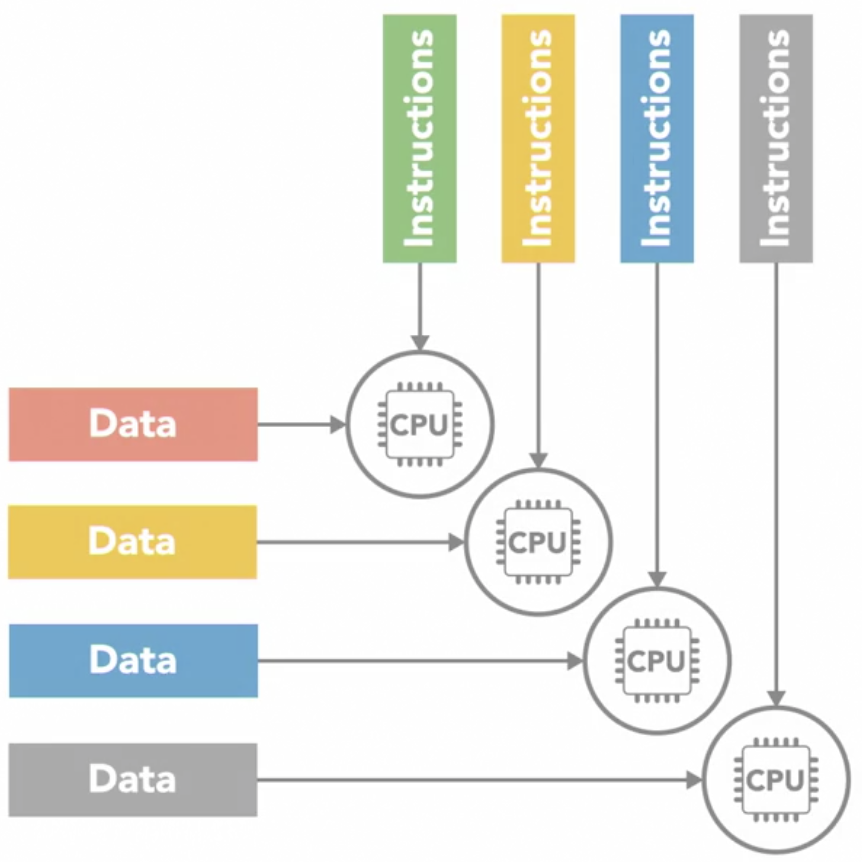
every processing unit can be operating on a different set of data
it is the most commonly used architecture
can find it in multicore PCs, network clusters, supercomputers
can be further subdivided into 2 parallel programming models
Single Program Multiple Data (SPMD)

- multiple processing units are executing a copy of the same single program simultaneously
- but each can use different data
- different from
SIMDbecause although each processor is executing the same program- they do not have to be executing the same instruction at the same time
- the processors can run asynchronously
- the program usually includes conditional logic that allows different tasks within the program to only execute specific parts of the overall program
- it is the most common style of parallel programming
- multiple processing units are executing a copy of the same single program simultaneously
Multiple Program Multiple Data (MPMD)
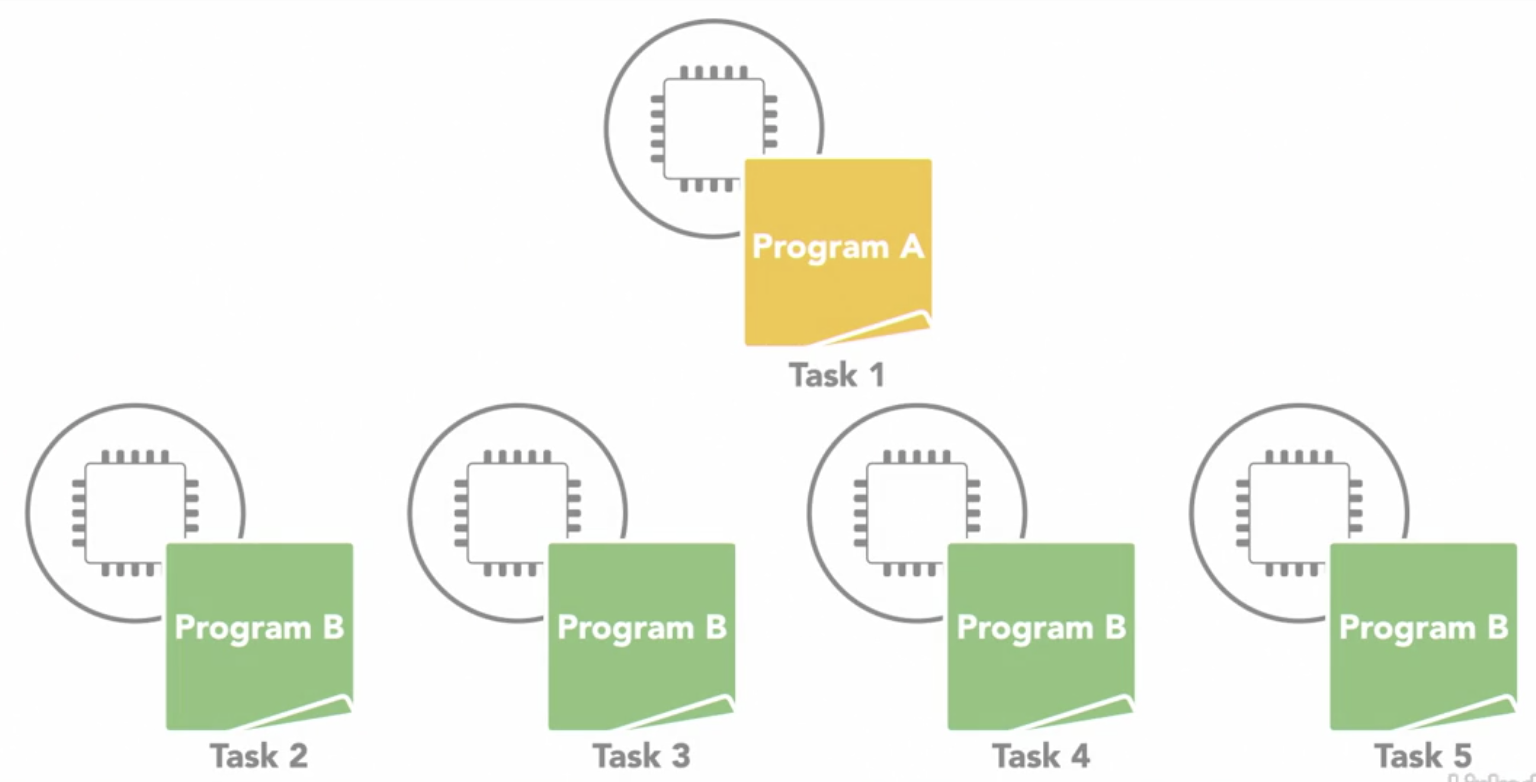
- each processors is executing a different program
- processors can be executing different, independent programs at the same time while also be operating on different data
- typically in this model, 1 processing node will be selected as the host or manager
- which runs 1 program that farms out data to the other nodes running a 2nd program
- those other nodes do their work and return their results to the manager
- it is not as common as
SPMDbut can be useful for some applications that lend themselves to functional decomposition
Shared vs distributed memory
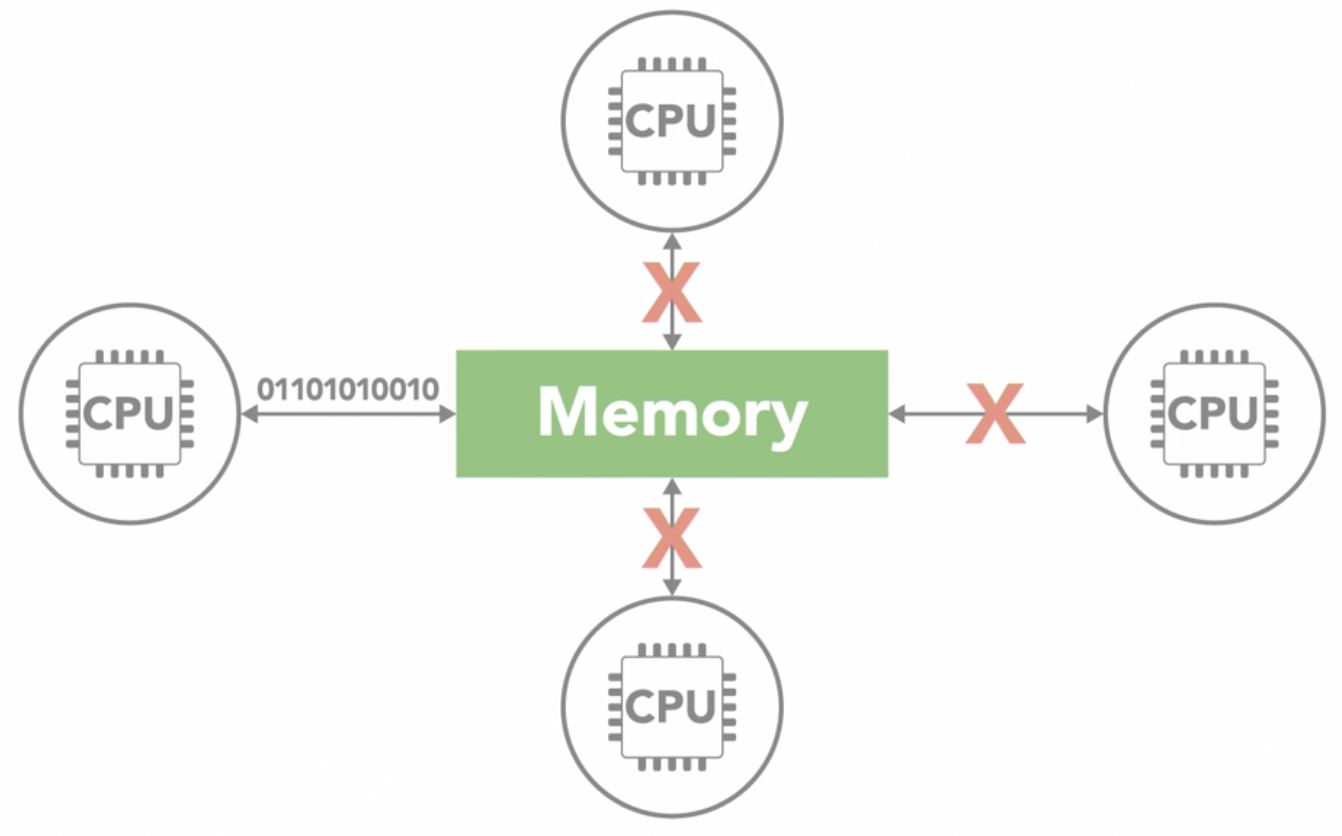
accessing memory needs to be fast enough to get the instructions and data required in order to be able to make use of more processors
computer memory usually operates at a much slower speed than processors
when 1 processor is reading or writing to memory, it often prevents any other processors from accessing the same memory element
there are 2 main memory architectures that exists for parallel computing
shared memory
all processors have access to the same memory as part of a global address space
although each processor operates independently
- if 1 processor changes a memory location, all of the other processor operates will see that change
the term shared memory does not mean all data exists on the same physical device
it could be spread across a cluster of systems
the key is that both of the processors see everything that happens in the shared memory space
the shared memory architectures have the advantage of being easier for programming in regards to memory
- because its easier to share data between different parts of a parallel program
disadvantage is that they don't often scale well
- adding more processors to a shared memory system will increase traffic on the shared memory bus
- shared memory puts responsibility on the programmer to synchronize memory accesses to ensure correct behavior
often classified into 1 of 2 categories, which are based on how the processors are connected to memory and how quickly they can access it
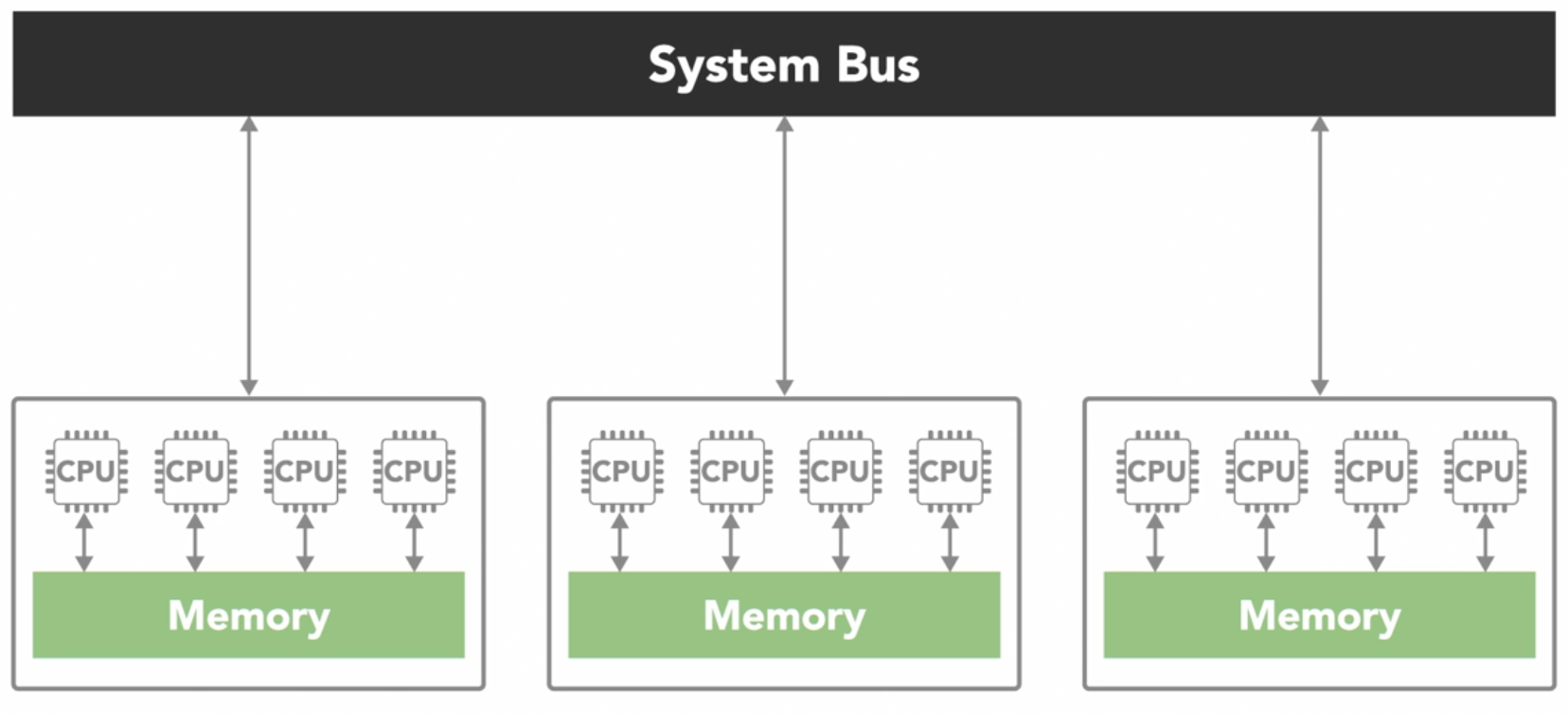
Uniform memory access (UMA)
all of the processors have equal access to the memory
- means that they can access it equally fast
several types of UMA architectures
most common is
symmetric multiprocessing system(SMP)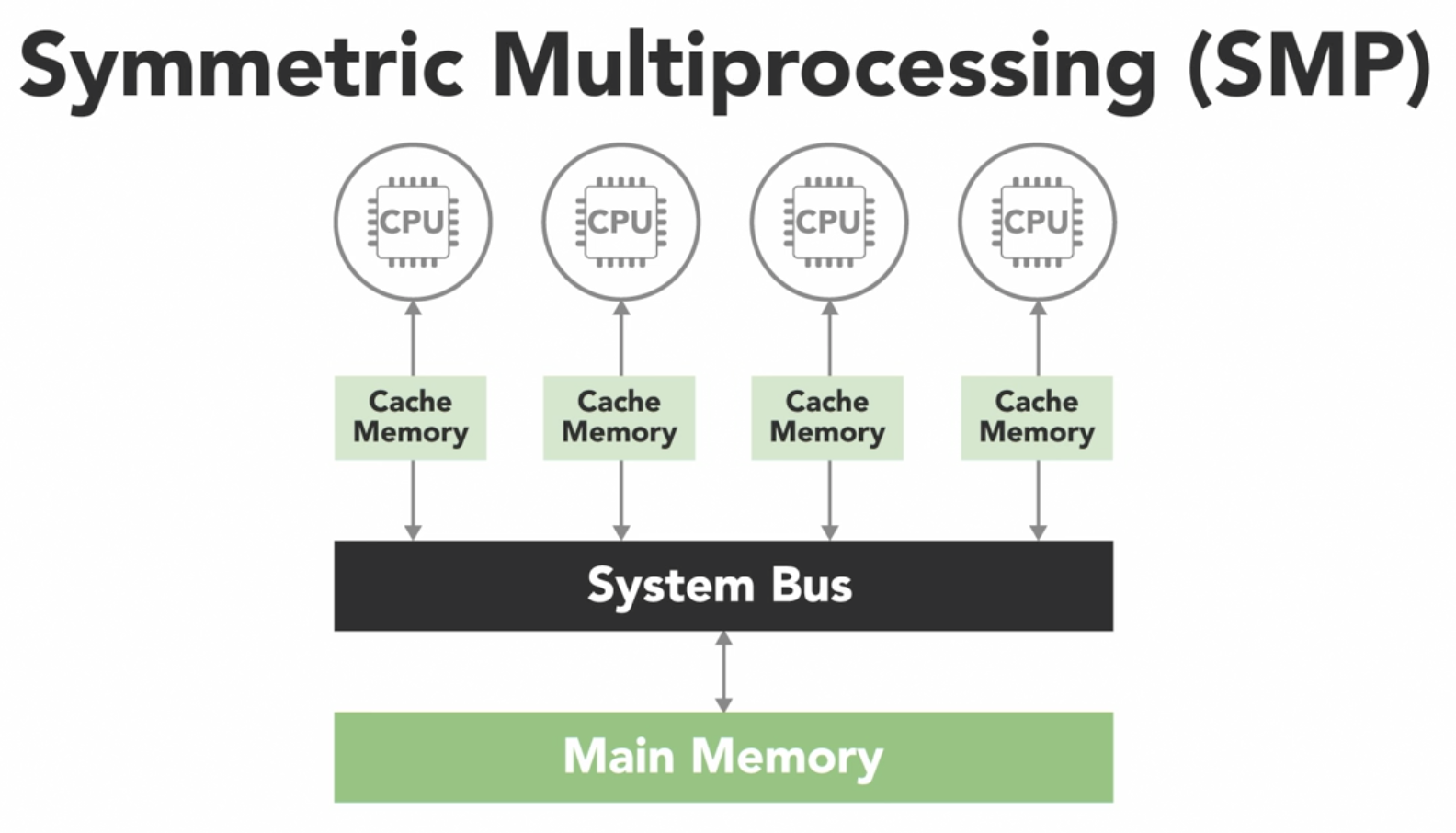
- has 2 or more identical processors which are connected to a single shared memory often through a system bus
- in modern multicore processors, each of the processing cores are treated as a separate processor
- in most modern processors, each core has its own cache
- it is a small and very fast piece of memory that only it can see and it uses it to store data that it's frequently working with
- however, caches introduces the challenge that if 1 processor copies a value from the shared main memory, then makes a change to it in its local cache
- that change needs to be updated back in the shared memory before another processor reads the old value, which is no longer current
- this issue is called
cache coherency - handled by the hardware in multicore processors
Non-uniform memory access (NUMA)
- often made by physically connecting multiple
SMPsystems together - the access is nonuniform because some processors will have quicker access to certain parts of memory than others
- it takes longer to access things over the bus
- overall, every processor can still see everything in memory
- often made by physically connecting multiple
distributed memory
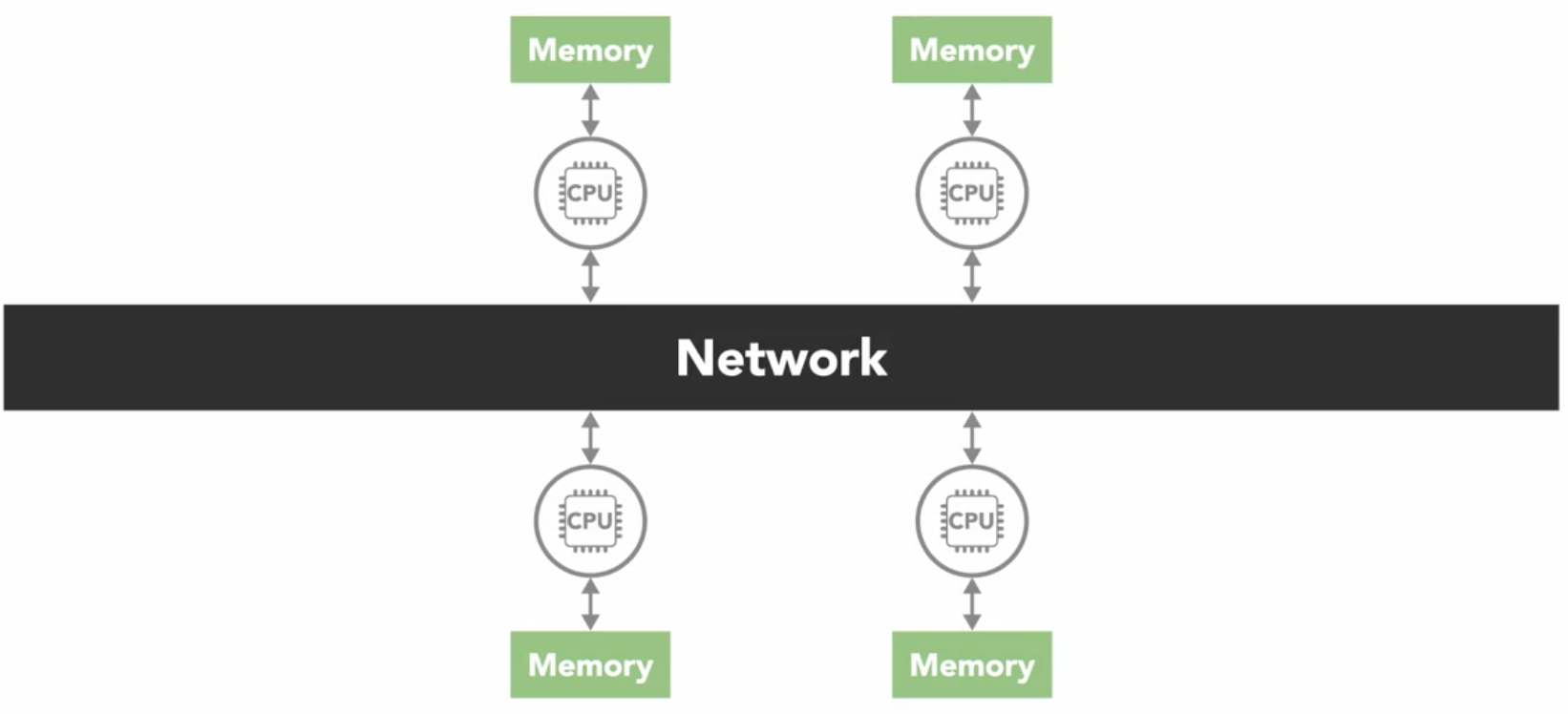
- in a distributed memory system, each processor has its own local memory with its own address space
- concept of a global address space doesn't exist
- all the processors are connected through some sort of network, which can be as simple as
Ethernet - each processor operates independently
- if it makes changes to its local memory, that change is not automatically reflected in the memory of other processors
- it is up to the programmers to explicitly define how and when data is communicated between the nodes in a distributed system
- this is a disadvantage
- advantage of a distributed memory architecture is that its scalable
- when more processors are added to the system, memory also increases
- it makes it cost effector to use commodity, of the shelf computers and networking equipment to build large distributed memory systems
- most supercomputers use some form of distributed memory architecture or a hybrid of distributed and shared memory
Threads and Processes
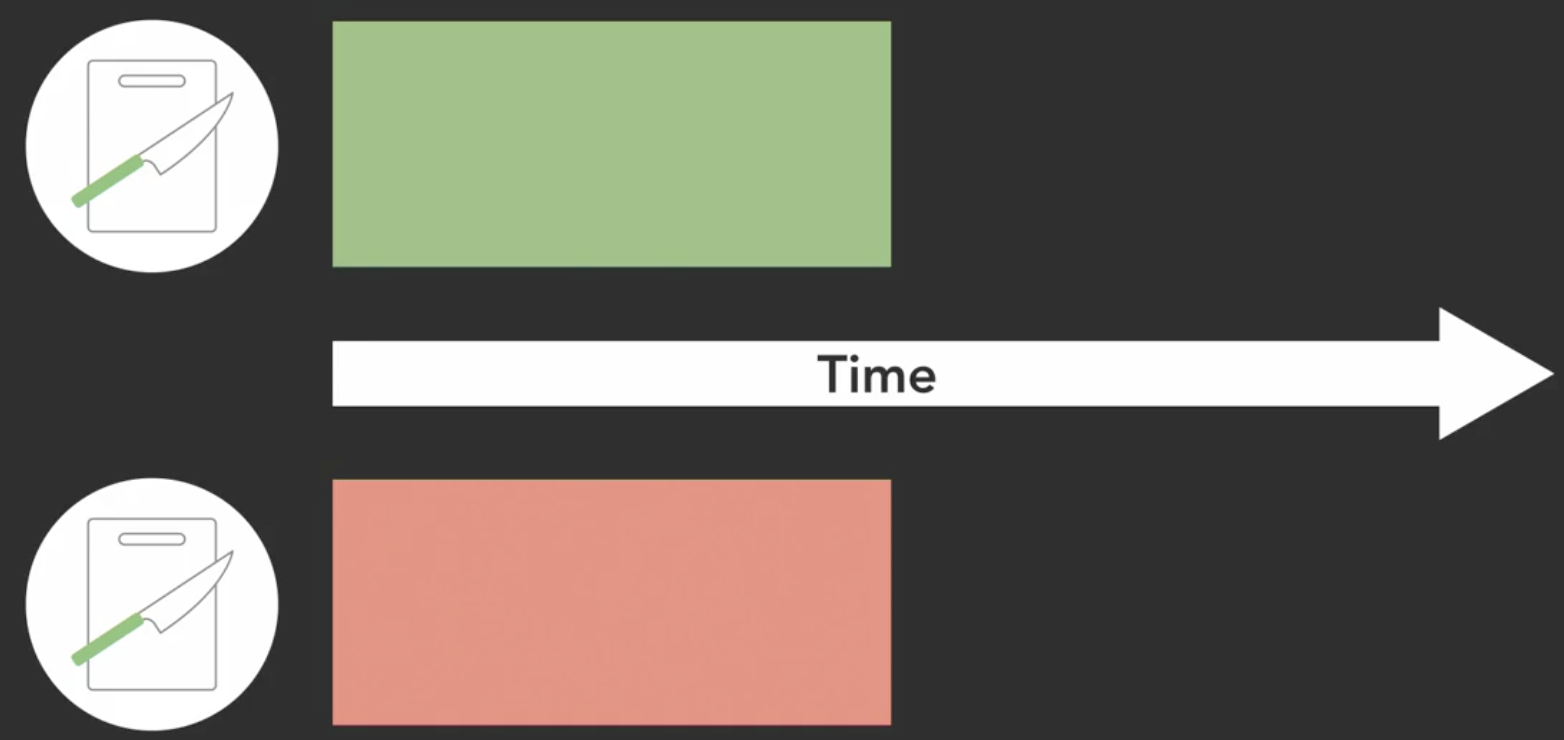
Threads vs process
- the concept of 2 people doing the same thing such as cooking
- each person is a thread, while the cooking is the process
- both person work independently contributing to the cooking process
- both have direct access to the same cookbooks containing cooking instructions data
- the ingredients being used represents the data and variables being manipulated
- however, this will cause problems if there are poor coordination between the people (threads)
- process
- it is the instance of the program executing when an application runs on a computer
- the process consists of the program's code, data, and information about its state
- each process is independent and has its own separate address space in memory
- a computer can have hundreds of active processes at once
- the operating system's job is to manage all of these
- sharing resources between separate processes is not as easy as sharing between threads in the same process
- because every process exists in its own address space
- example
- 2 kitchens (processes), 2 person (thread) in each kitchen, working on different recipes (program)
- each kitchen have their own ingredients and you can't access the ingredients from a different kitchen
- 2 kitchens (processes), 2 person (thread) in each kitchen, working on different recipes (program)
- there are ways to communicate and share data between processes, but requires more work than communicating between threads
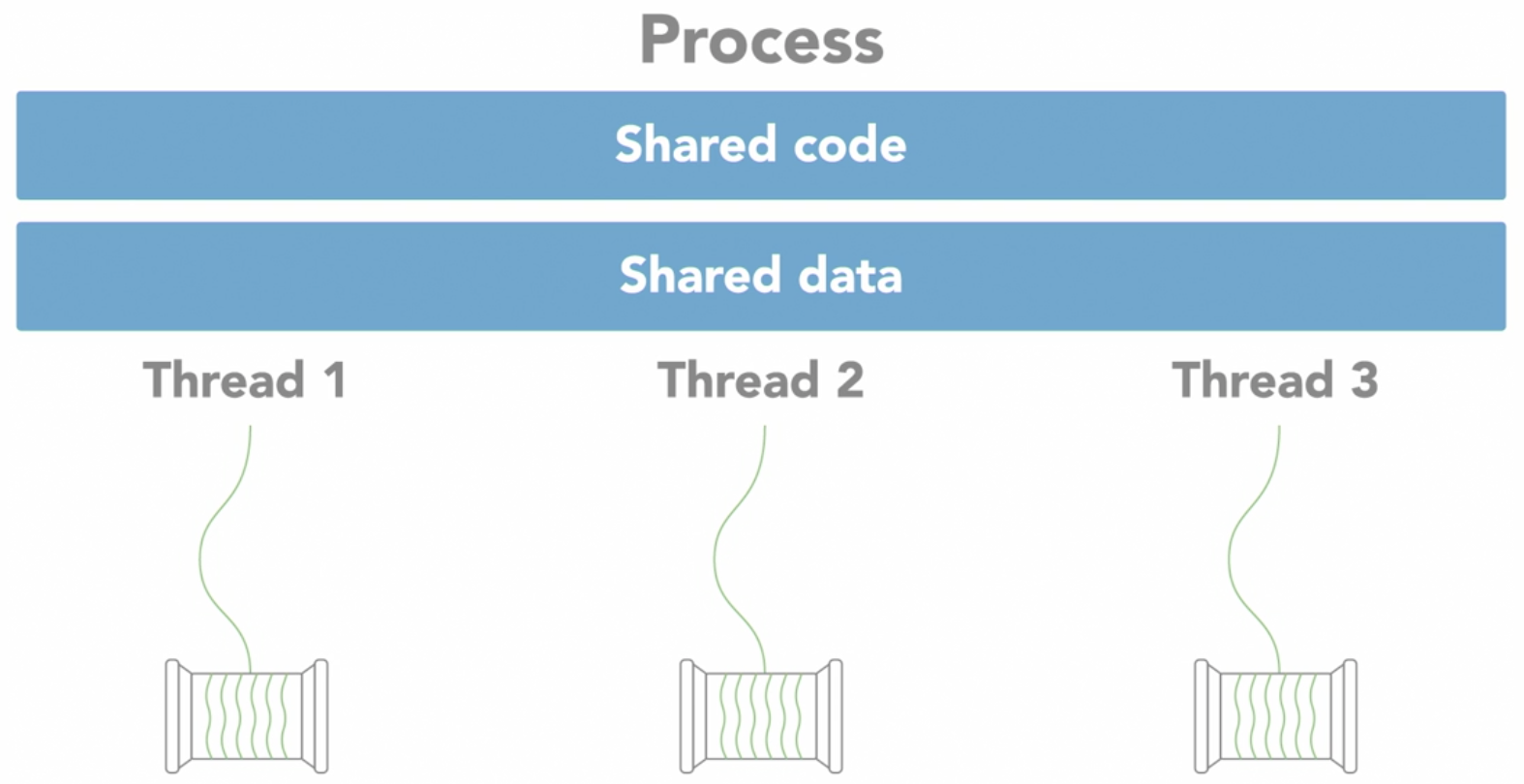
- threads
- within every process, there are 1 or more smaller sub elements called
threads- these are similar to a tiny processes
- each thread
- is an independent path of execution through the program
- a different sequence of instructions
- can only exist as part of a process
- threads are the basic units that the operating system manages
- it allocates time on the processor to execute them
- threads that belong to the same process share the processes address space
- it gives them access to the same resources in memory including the program's executable code and data
- within every process, there are 1 or more smaller sub elements called
- communication between processes
- e.g.:
- use system provided Inter-Process Communication (IPC) mechanisms like Sockets and pipes
- allocating special inter-process shared memory space
- using remote procedure calls
- e.g.:
- writing parallel programs that use multiple processes working together towards a common goal or using multiple threads within a single process
- which to use depends on what you are doing and the environment it's running
- because implementation of threads and processes differs between operating systems and programming languages
- if the application is going to be distributed across multiple computers, it would be better to separate processes for it
- but as a rule of thumb, if can structure the program to take advantage of multiple threads, stick to using threads than using multiple processes
- because threads are considered lightweight compared to processes, which are more resource intensive
- a thread requires less overhead to create and terminate than a process
- using multiple threads is usually faster for an operating system to switch between executing threads from the same process than to switch between different processes
- which to use depends on what you are doing and the environment it's running
Concurrent vs Parallel execution
- just because a program is structured to have multiple threads or processes does not mean they'll necessarily execute in parallel
| Concurrency | Parallelism |
|---|---|
| Program Structure | Simultaneous Execution |
| Dealing with multiple things at once | Doing multiple things at once |
Concurrency
it refers to the ability of an algorithm or program to be broken into parts that can run independently of each other
- they are order independent
- e.g.: in a salad recipe, chopping lettuce, cucumbers, tomatoes etc can be done concurrently by different people and the order is not important
Concurrent Execution
single processor
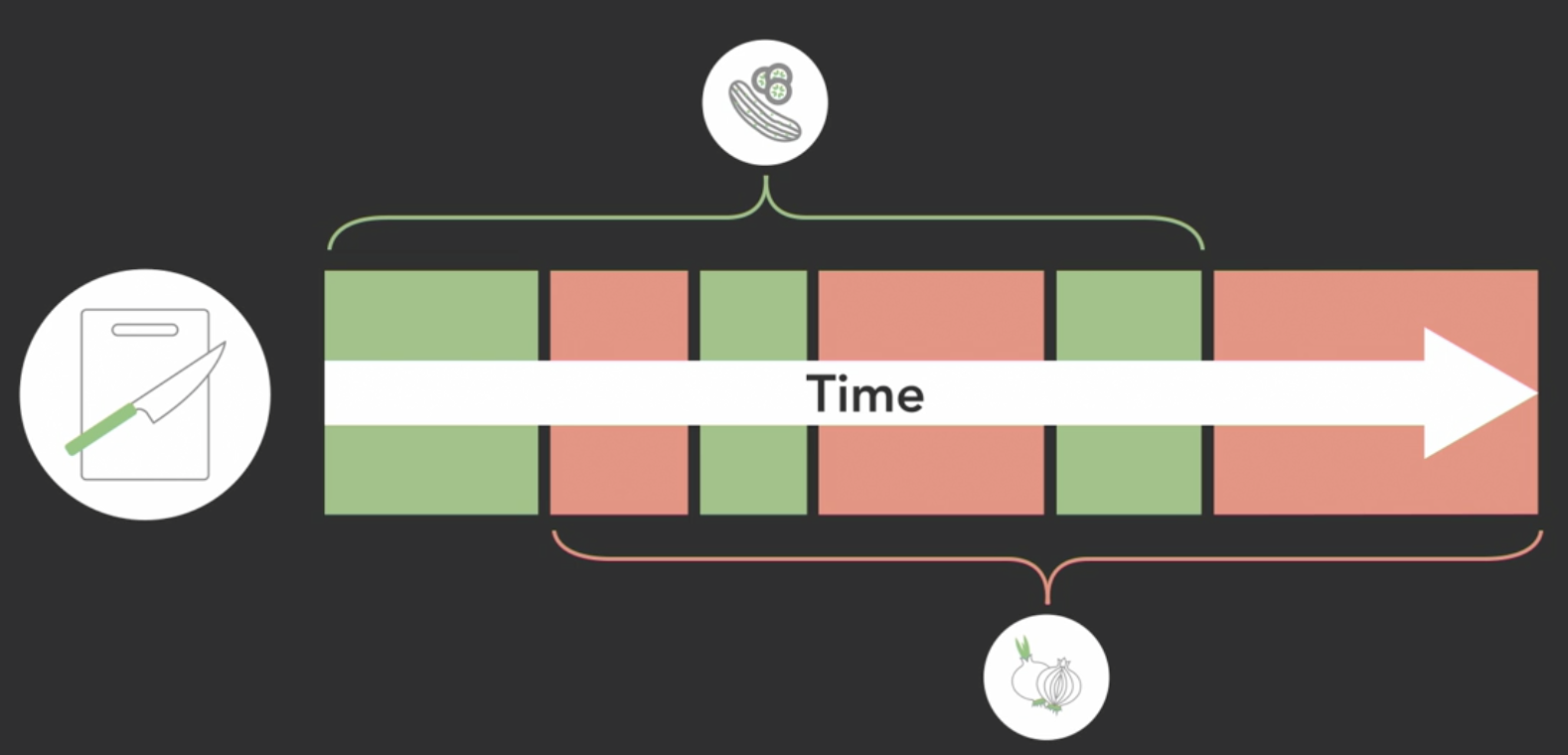
- only 1 task can be executed at any instant in time
- different tasks will be swap and take turns to be executed
- if tasks are swapped frequently
- it creates the illusion that it is executing simultaneously on the single processor, but is not true parallel execution
Concurrent programming is useful for I/O dependent tasks like graphical user interfaces
- when user clicks a button to execute an operation
- to avoid locking up the user interface until it is completed
- we can run the operation in a separate concurrent thread
- thus leaving the thread that's running the UI free to accept new inputs
- we can run the operation in a separate concurrent thread
Parallel
- requires parallel hardware in order to execute in parallel
- types of parallel hardware
- Multi-Core Processors
- used mostly in desktop computers and cellphones
- Graphics Processing Unit
- contains hundreds or thousands of specialized cores working in parallel to make amazing graphics
- Computer Cluster - distribute their processing across multiple systems
- Multi-Core Processors
- types of parallel hardware
- programs may not always benefit from parallel execution
- e.g.: software drivers that handles I/O devices (mouse, keyboard, hard drive)
- they are managed by the operating system as independent things that get executed
- in a multi-core system, the execution of those drivers might get split amongst the available processors
- however, since I/O operations occur infrequently, relative to the speed at which computer operates, nothing is gain from parallel execution
- thus it can run on a single processor without any difference
- e.g.: software drivers that handles I/O devices (mouse, keyboard, hard drive)
- parallel processing becomes useful for computationally intensive tasks
- such as calculating the result of multiplying 2 matrices together
- when large math operations can be divided into independent subparts, executing those parts in parallel on separate processors can speed things up
Execution Scheduling
threads don't execute when they want to
the Operating System includes a scheduler that controls when different threads and processes get their turn to execute on the CPU
the
schedulermakes it possible for multiple programs to run concurrently on a single processorwhen a process is created and ready to run, it gets loaded into memory and placed in the ready queue
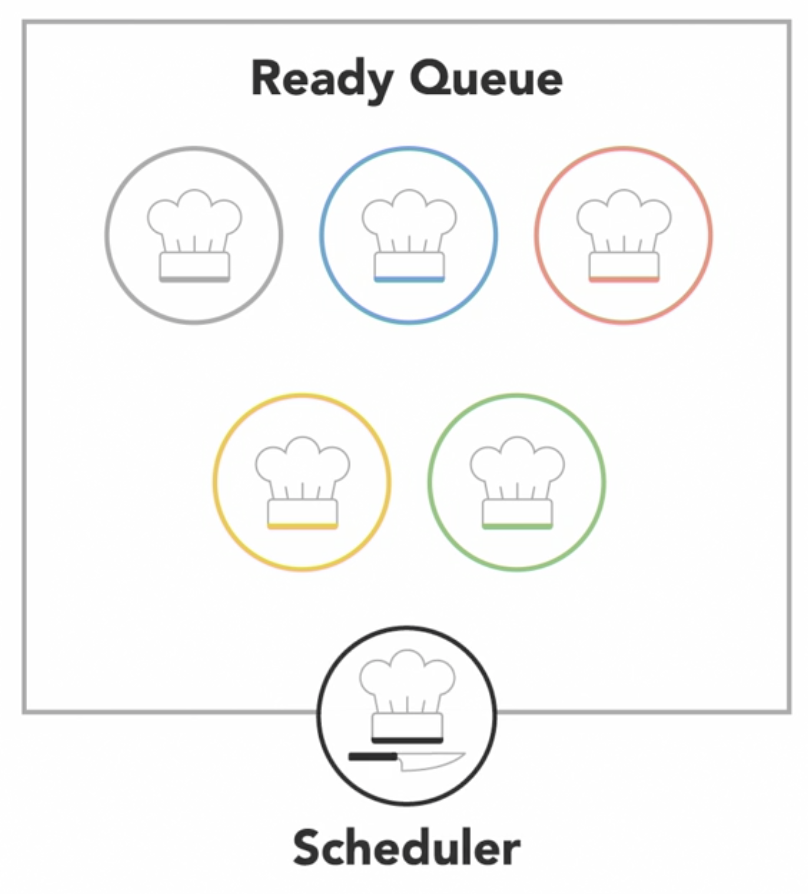
the scheduler cycles through the ready processes so that they get a chance to execute on the processor
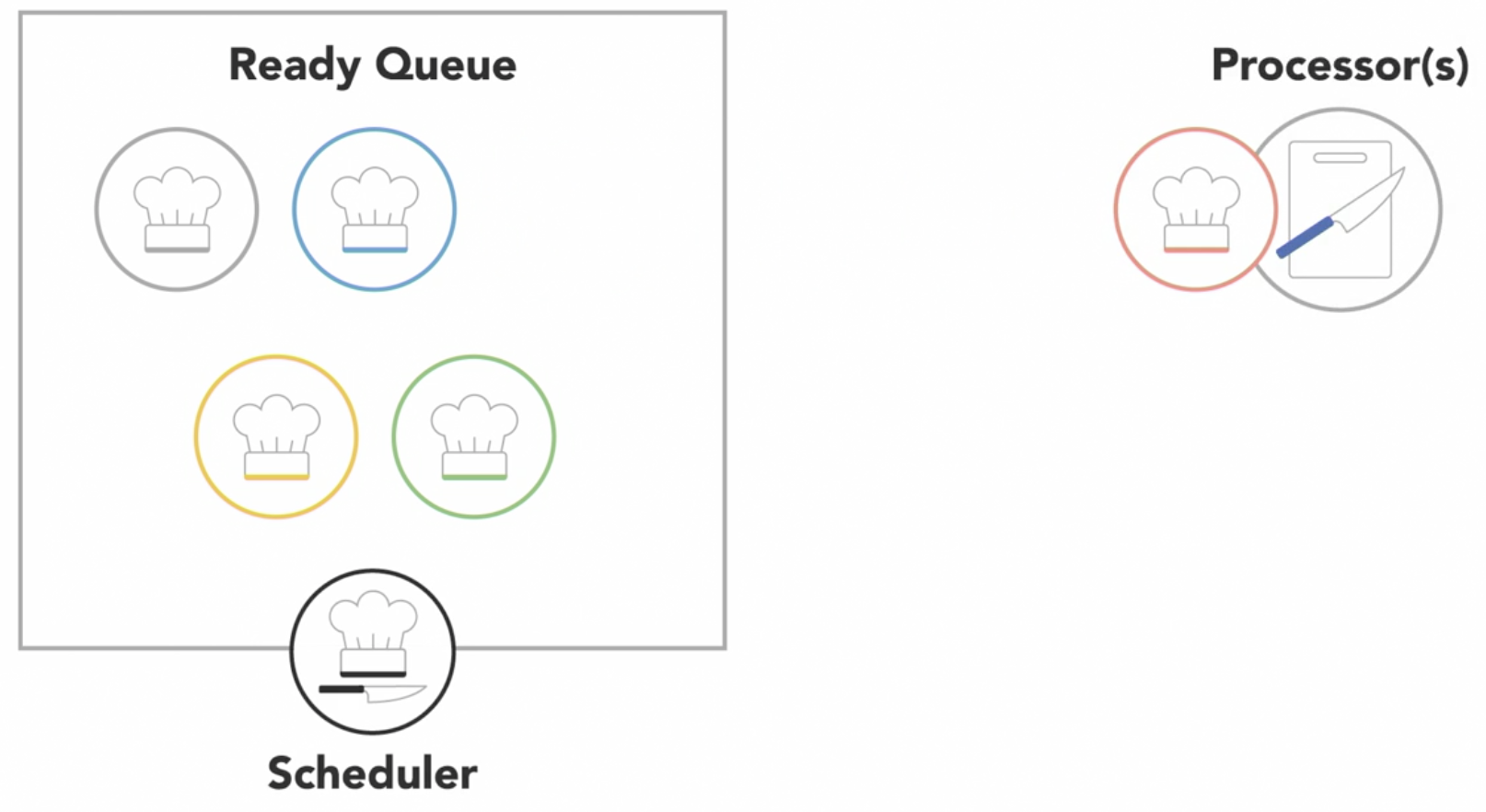
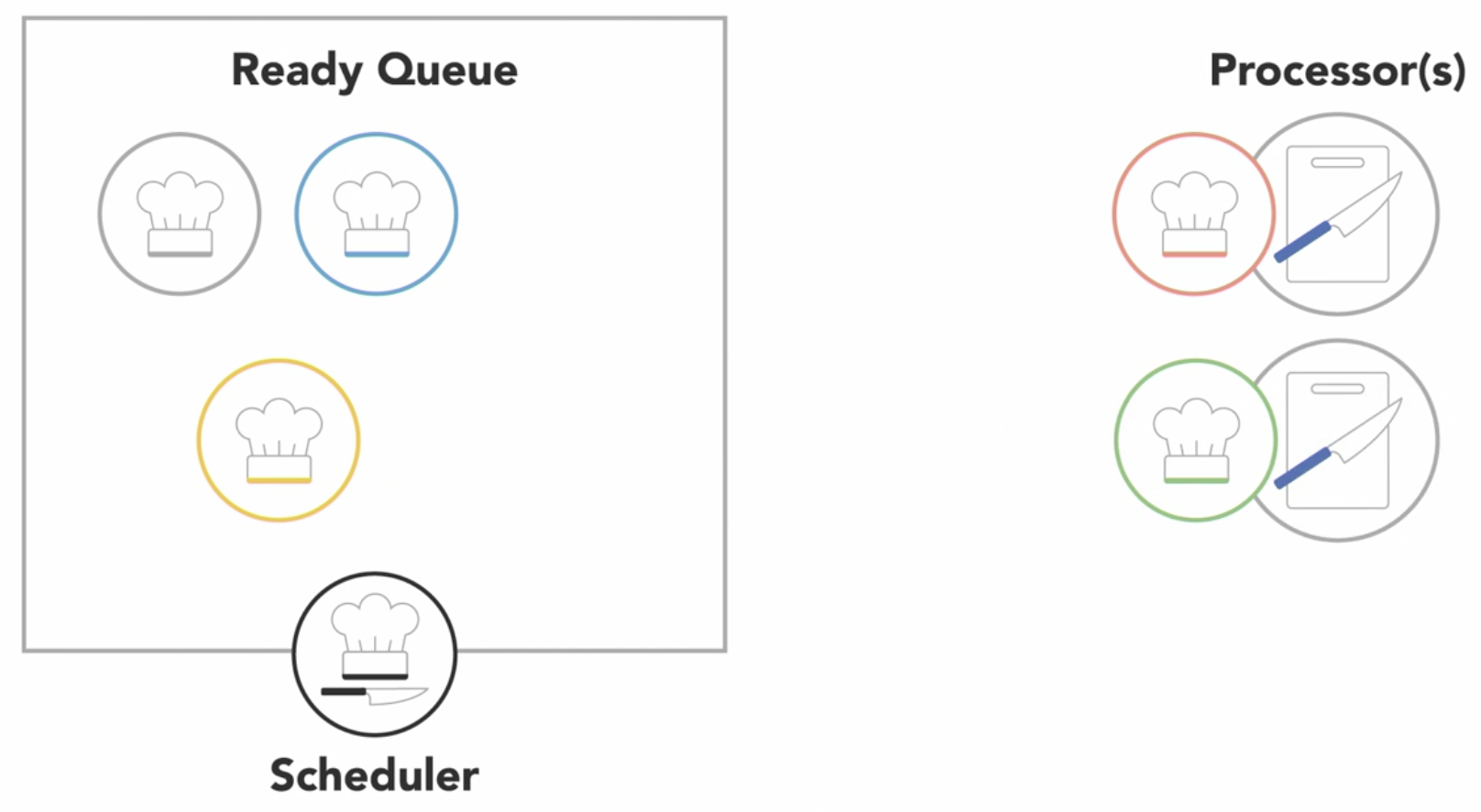
if there are multiple processors, the OS will schedule processors to run on each of them to make the most use of the additional resources
a process will run until it finishes, then the scheduler will assign another process to execute on that processor
or a process might get blocked and have to wait for an I/O event
- in this case, it will go into a separate I/O waiting queue so that another process can run
or scheduler might determine that a process has spent its fair share of time on the processor and swap it out for another process from the ready queue, also referred to as
context switch
- the OS has to save the state or context of the process that was running so that it can be resumed later
- then it has to load the context of the new process that is about to run
context switchesare not instantaneous- it takes time to save and restore the registers and memory state
- thus the scheduler needs a strategy for how frequently it switches between processes
Scheduling Algorithms- First come, first served
- Shortest job next
- Priority
- Shortest remaining time
- Round-robin
- Multiple level queues
Preemptive Algorithms- a running low priority task might pause or preempt when a higher priority task enters the ready state
Non-preemptive Algorithms- once a process enters the ready state, it'll be allowed to run for its allotted time
Which scheduling algorithm is used by the OS depends which of the following scheduling goals is required
- maximize throughput
- maximize fairness
- minimize wait time
- minimize latency
we might not have any control over when the parts of the program gets executed as it is often handled under the hood by the OS